Autonomous Vehicle Threat Assessment Integration – Graduation Project
Project Purpose and Scope
This project is my senior capstone (Undergraduate, 4th year, Fall 2025) at İskenderun Technical University. The thesis was accepted and successfully completed.
You can access the full, more detailed thesis here.
A locally running threat-assessment module was developed to be mounted on urban-security-oriented autonomous/semi-autonomous systems. From the camera stream it determines in real time whether a person is armed or unarmed, reports status and coordinates to the host PC, and simultaneously tracks the target with a two-axis turret. The system is designed to be integrated into drones or ground robots via a lightweight gimbal structure.
General Operating Principle
- Perception (Model): Webcam frames are processed with YOLOv8; person/weapon objects and center coordinates are extracted.
- Decision: The state is classified into three categories:
A=Unarmed Person,B=Armed Person,C=None. Time tolerances are applied to handle brief occlusions of the weapon/person. - Action (Turret): Horizontal/vertical servos move according to coordinate error; a laser and an RGB LED are used as status indicators.
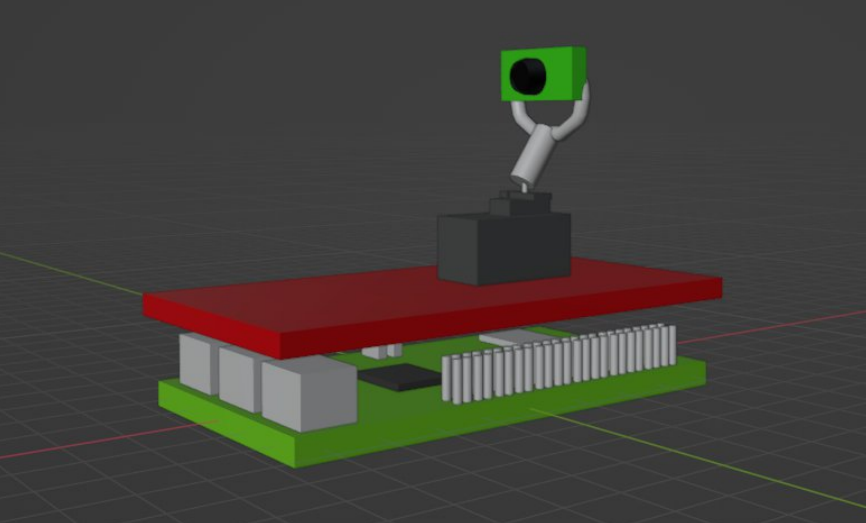
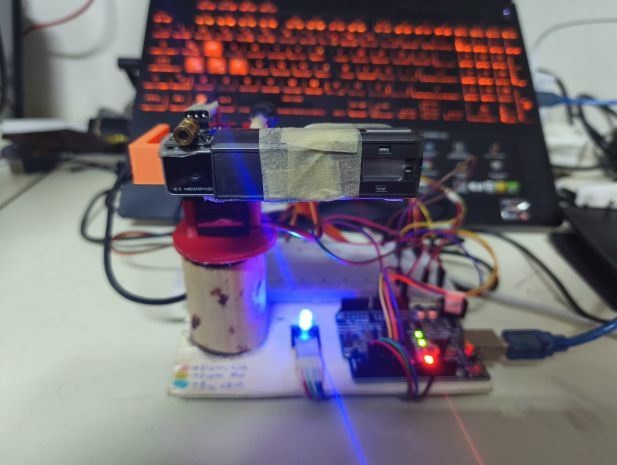
Turret Image – Front view of the prototype
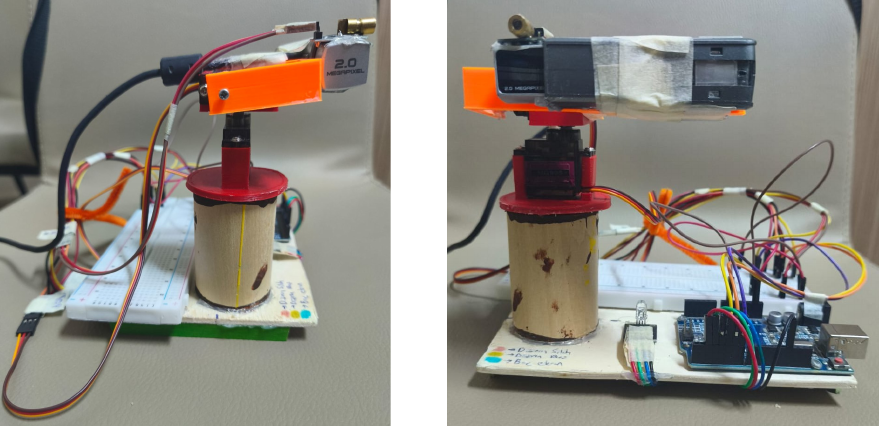
Turret Image – Left and front views of the prototype
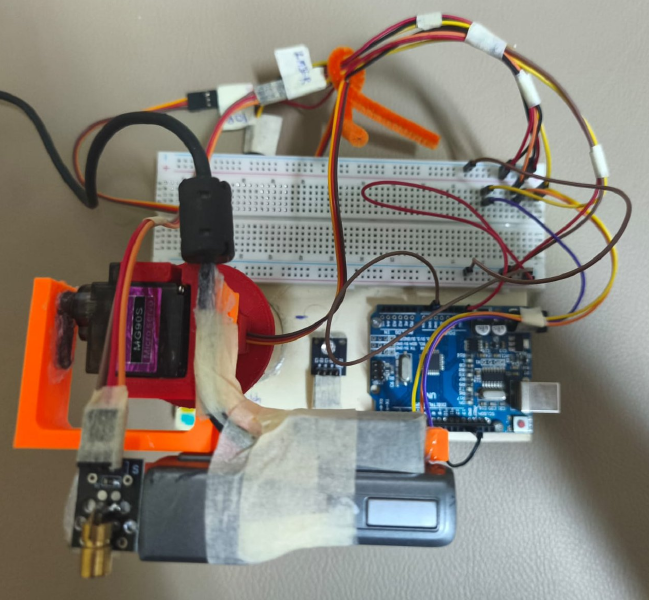
Turret Image – Top view of the prototype
Hardware Architecture
- Microcontroller: Arduino UNO (ample pins, sufficient processing power, serial communication).
- Servos: 2× MG90S (metal gears, ~1.5 kg·cm torque class).
- Indicators: 5V laser module and RGB LED module.
- Power: For stability, servos are powered from a dedicated 5V/1.5A adapter; other modules from the Arduino.
- Imaging: USB 2 MP webcam (power/data from PC).
- Mechanics: Gimbal/turret parts via 3D print (ABS for strength, PLA for light weight); wood used for base/frame parts.
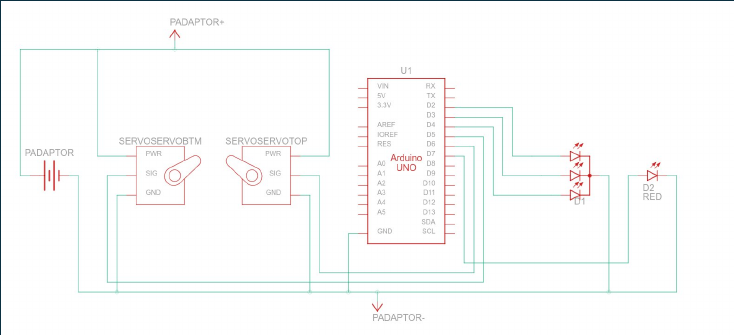
Circuit Image – Schematic of the prototype
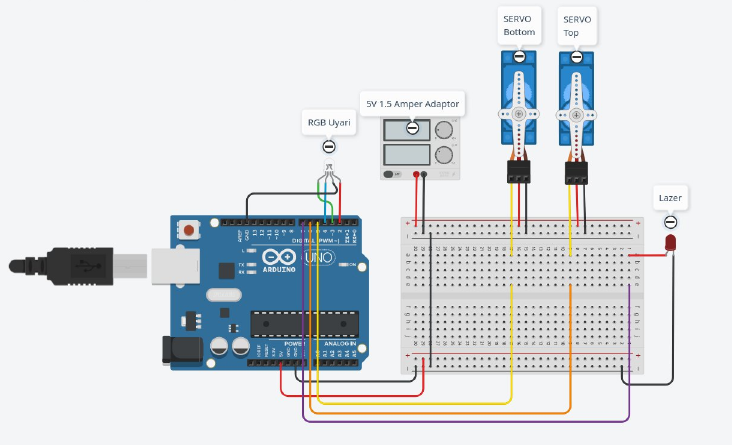
Circuit Image – Prototype schematic in Tinkercad
Software Structure
1) Application (PC side)
- Language/Libraries: Python, YOLOv8, OpenCV, PySide6 (GUI).
- Workflow: Capture frame → detect person/weapon with YOLOv8 → extract class and coordinates → apply time tolerances → create serial message → send to Arduino.
- Time Tolerances:
GUN_WAIT=10s,MAN_WAIT=1s(maintains stability even if the weapon/person is briefly occluded). -
Serial Protocol:
{center_x:03}{center_y:03}{C3}{C4}\n C3 ∈ {A,B,C} # state C4 ∈ {Y,N} # laser on/off - Per-class Object Limits: e.g.,
{0:1, 1:1}(person=0, weapon=1).
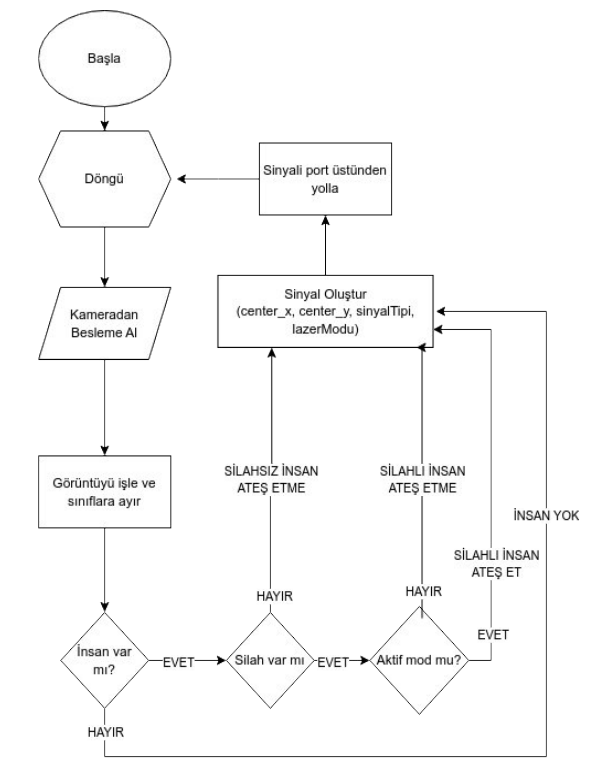
Turret Image – Application software flowchart

Turret Image – Turret (firmware) software flowchart
2) Turret (Arduino side)
- Pins: RGB LED (2–4), Horizontal servo (5), Vertical servo (6), Laser (7), Serial 9600.
-
State Management:
A(unarmed): LED=green, target tracking activeB(armed): LED=red, target tracking + optional laserC(none): LED=blue, scan mode (sweep left–right)
- Motion: Screen center
(320,240)as reference; if error > tolerance, increment/decrement per axis; clamp vertical 0–90°, horizontal 0–180°.
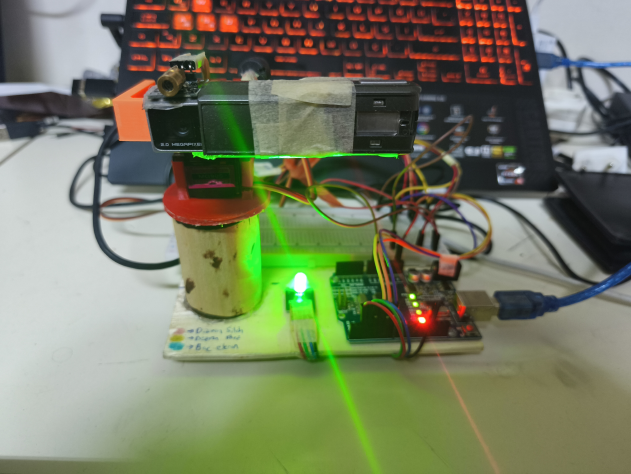
Turret Image – Prototype response when an UNARMED person is detected
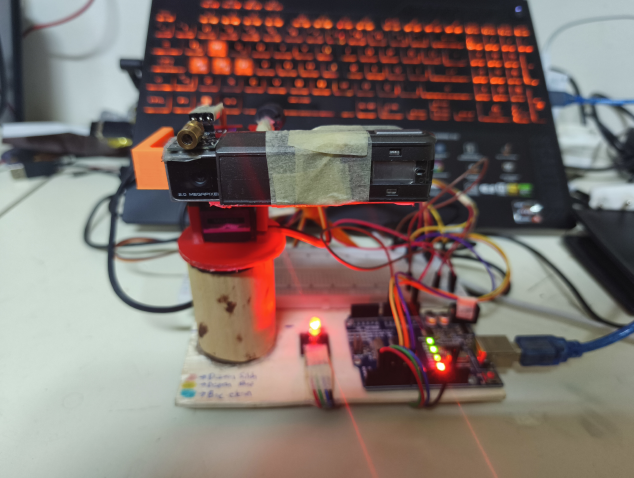
Turret Image – Prototype response when an ARMED person is detected
Turret Image – Prototype response when IDLE
Model (YOLOv8) Training and Testing
- Base model: Fine-tuned
yolov8l.ptwith close-range data. - Example hyperparameters:
epochs=64,batch=8; dataset focused on short-distance/altitude scenarios. - Outputs: Label/prediction samples and validation with field video frames.
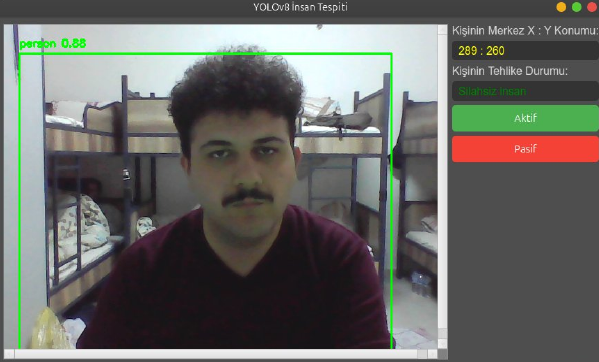
Application Image – Bounding when the application sees an unarmed person
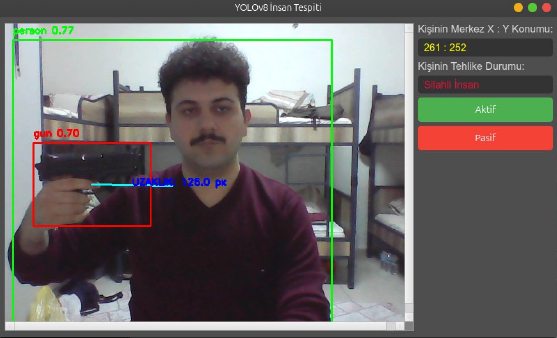
Application Image – Bounding when the application sees an ARMED person
Differences from Other Solutions
- Fully Local Processing: No cloud; privacy and offline operation advantages.
- Portable Integrated Design: Can be added to various mobile platforms (drone/UGV).
- Tracking Camera: Active target tracking with 2-axis servos (unlike static security cameras).
- Objective: Vehicle/robot situational awareness rather than fixed-infrastructure security. Examples used for comparison: commercial systems like SafePointe and Xtract One.
Challenges and Solutions
- Insufficient servo current → Added a dedicated 5V/1.5A adapter, separated data lines, reduced noise.
- Narrow field of view → Extended with an external camera + rotatable turret.
- Incompatible motion algorithm → Switched from coordinate-based to distance-based control.
- Image quality/model stability → Balanced temporary losses using time tolerances (10 s).
References
- Ultralytics YOLO (Raspberry Pi guide and reproducible results)
- SoundThinking – Stealth Weapons Detection
- Xtract One – AI Powered Weapon Detection System
Conclusion
The perception–decision–action chain was implemented end-to-end: local threat detection with YOLOv8, transfer to the turret via a serial protocol, servo-based target tracking, and visual status indicators combined in a single module. The integration-oriented design provides plug-and-play flexibility for real systems (drone, UGV).