Tehdit Değerlendiren Otonom Araç Entegresi – Bitirme Projesi
Projenin Amacı ve Kapsam
Proje benim İskenderun Teknik Üniversite’sinde Lisans 4. sınıf 1. dönem 2025 bitirme tezimdir. Tezim kabul aldı ve başarıyla geçtim.
Çok daha detaylı ve kapsamlı olan bitirme tezinin kendisine şuradan ulaşabilirsiniz .
Şehir içi güvenlik odaklı otonom/yarı-otonom sistemlere takılabilecek, lokal çalışan bir tehdit değerlendirme modülü geliştirildi. Kamera görüntüsünden silahlı-silahsız kişi durumunu anlık belirleyip ana bilgisayara durum ve koordinat bilgisini iletir; aynı anda iki eksenli turret ile hedefi takip eder. Sistem, drone veya kara robotlarına hafif gimbal yapısı ile entegre edilebilecek şekilde tasarlandı.
Genel Çalışma Prensibi
- Algılama (Model): Webcam görüntüsü YOLOv8 ile işlenir; kişi/silah nesneleri ve merkez koordinatlar çıkarılır.
- Karar: Durum 3 sınıftan biri olarak belirlenir:
A=Silahsız İnsan,B=Silahlı İnsan,C=Hiç Kimse/Yok. Silah/görünürlük gizlenmelerine karşı zaman toleransları uygulanır. - Eylem (Turret): Koordinat hatasına göre yatay/dikey servo hareket eder; laser ve RGB LED durum göstergesi olarak kullanılır.
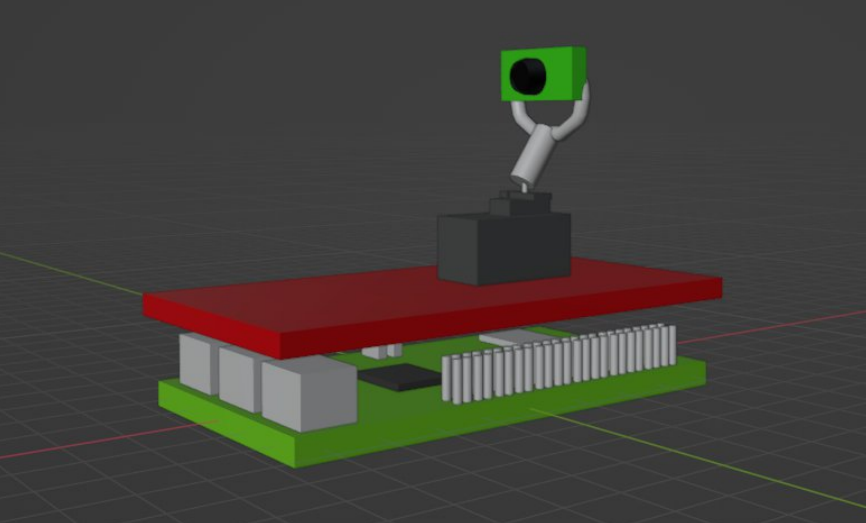
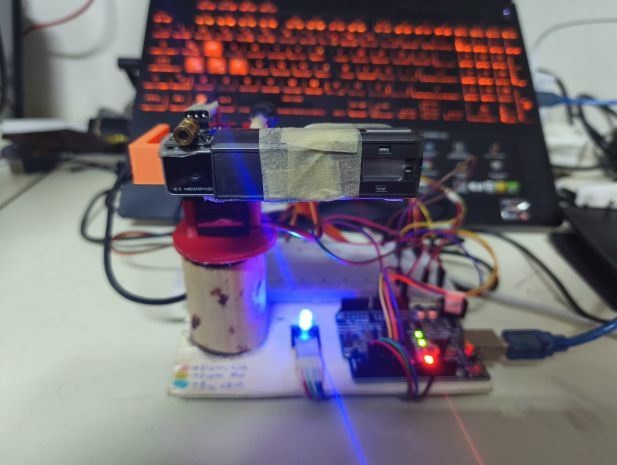
Turret Görseli – Prototipin ön görünümü
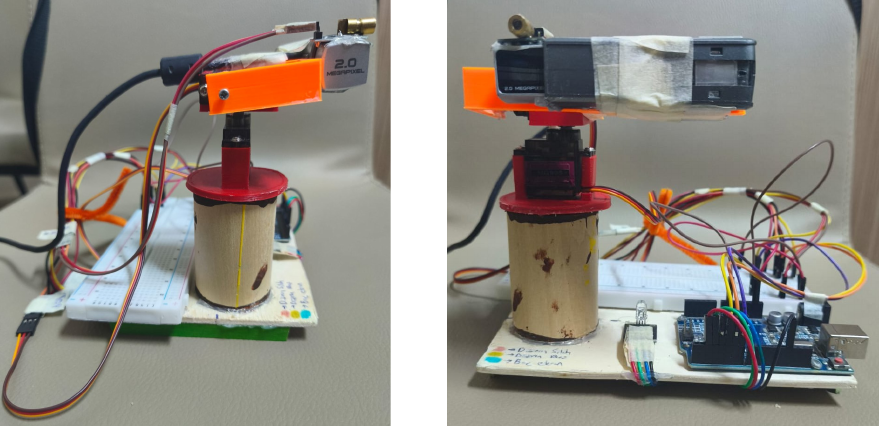
Turret Görseli – Prototipin sol ve önden görünümü
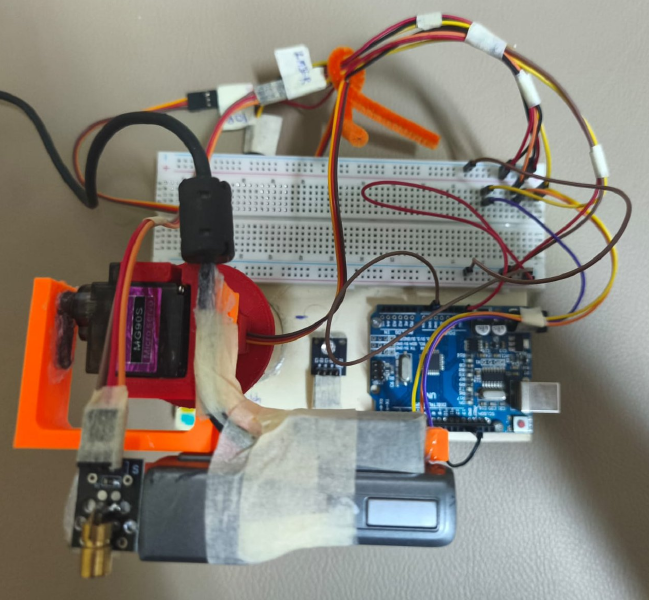
Turret Görseli – Prototipin üstten görünümü
Donanım Mimarisi
- Mikrodenetleyici: Arduino UNO (pin zenginliği, yeterli işlemci gücü ve seri haberleşme).
- Servo: 2× MG90S (çelik dişli, ~1.5 kg.cm tork sınıfı).
- Göstergeler: 5V lazer modülü ve RGB LED modülü.
- Besleme: Stabil çalışması için servo beslemesi harici 5V/1.5A adaptörden, diğer modüller Arduino’dan.
- Görüntü: USB 2 MP webcam (PC’den güç/veri).
- Mekanik: Gimbal/turret parçaları 3B baskı (ABS – dayanım, PLA – hafiflik); kaide/iskelet parçalarda ahşap.
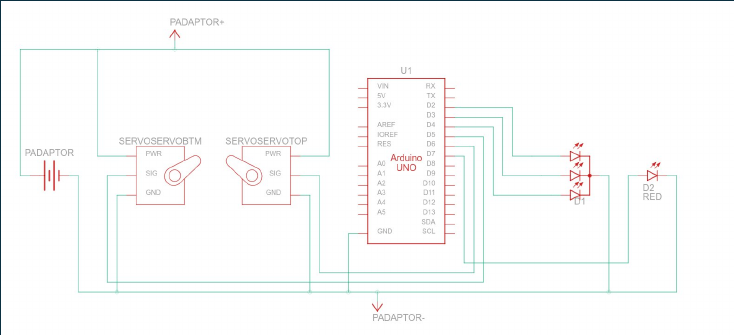
Devre Görseli – Prototipin devre şematiği
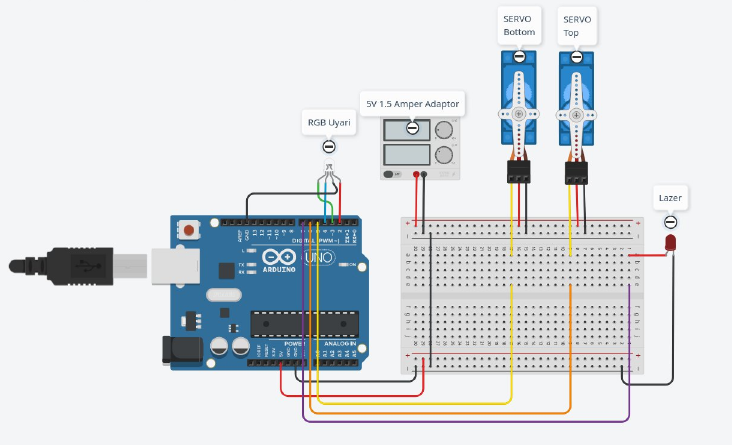
Devre Görseli – Prototipin devre şematiği Tinkercad
Yazılım Yapısı
1) Uygulama (PC tarafı)
- Dil/Kütüphaneler: Python, YOLOv8, OpenCV, PySide6 (GUI).
- İş Akışı: Kameradan kare → YOLOv8 ile kişi/silah algılama → sınıf ve koordinat çıkarımı → zaman toleransları → seri mesaj oluşturma → Arduino’ya gönderim.
- Zaman Toleransları:
GUN_WAIT=10s,MAN_WAIT=1s(silah/insan kısa süre gizlense de istikrar korunur). -
Seri Protokol:
{center_x:03}{center_y:03}{C3}{C4}\n C3 ∈ {A,B,C} # durum C4 ∈ {Y,N} # lazer açık/kapalı - Sınıf Başına Nesne Sınırı: Örn.
{0:1, 1:1}(insan=0, silah=1).
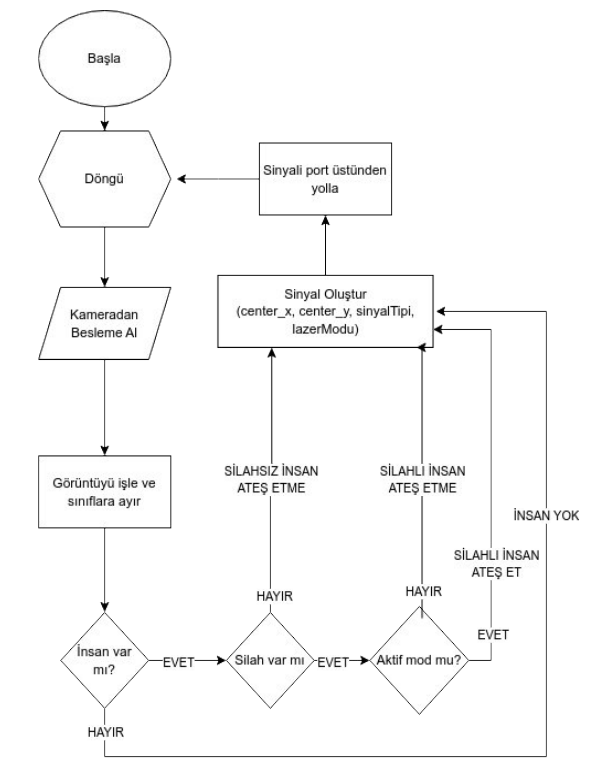
Turret Görseli – Prototipin Application yazılımı akış şeması

Turret Görseli – Prototipin Turet yazılımı akış şeması
2) Turret (Arduino tarafı)
- Pinler: RGB LED (2–4), Yatay servo (5), Dikey servo (6), Lazer (7), Serial 9600.
-
Durum Yönetimi:
A(silahsız): LED=yeşil, hedef takibi aktifB(silahlı): LED=kırmızı, hedef takibi + opsiyonel lazerC(yok): LED=mavi, tarama modu (sağ-sol süpürme)
- Hareket: Ekran merkezi
(320,240)referans; fark > tolerans ise eksen bazlı artış/azalış; dikey açı 0–90°, yatay 0–180° sınırlandırma.
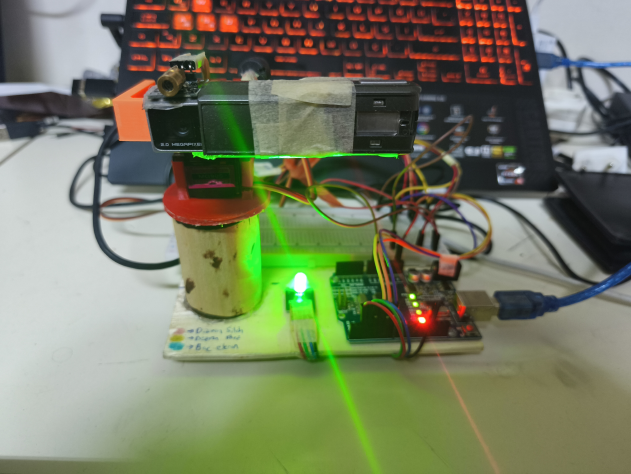
Turret Görseli – Prototipin SİLAHSIZ insan tespitinde tepkisi
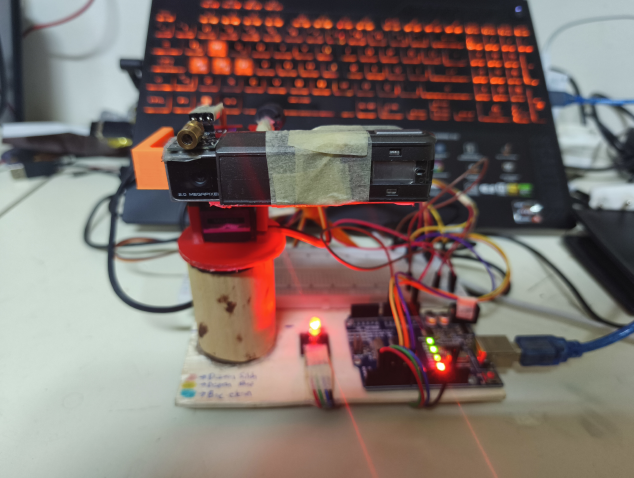
Turret Görseli – Prototipin SİLAHLI insan tespitinde tepkisi
Turret Görseli – Prototipin BOŞTA tepkisi
Model (YOLOv8) Eğitimi ve Test
- Taban model:
yolov8l.ptüzerine yakın çekim verilerle ince ayar. - Örnek hiperparametreler:
epochs=64,batch=8; kısa mesafe/irtifa senaryolarına odaklı veri düzeni. - Çıktılar: Etiket/prediction örnekleri ve saha video kareleriyle doğrulama.
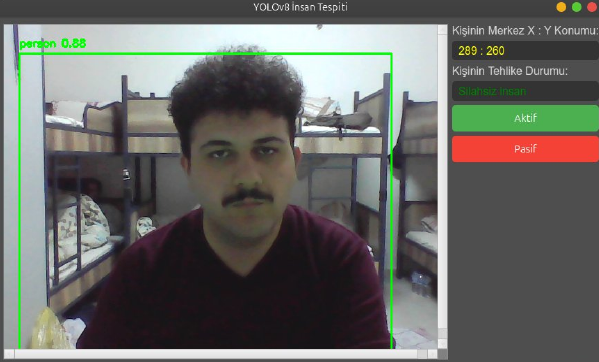
Uygulama Görseli – Uygulamanın silahsız insan görünce kutulaması
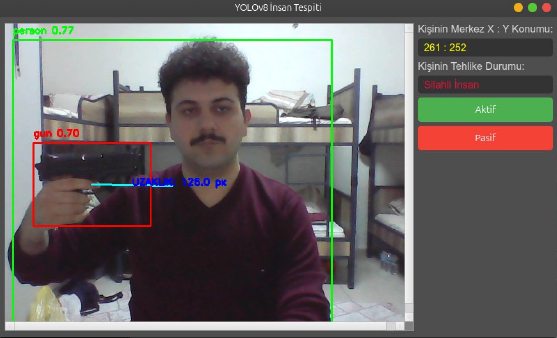
Uygulama Görseli – Uygulamanın SİLAHLI insan görünce kutulaması
Diğer Çözümlerden Farklar
- Tamamen Lokal İşleme: Bulut yok; gizlilik ve offline çalışma avantajı.
- Taşınabilir Entegre Tasarım: Farklı mobil platformlara (drone/UGV) eklenebilir.
- Takipli Kamera: 2 eksen servo ile aktif hedef takibi (güvenlik kameralarından farklı).
- Amaç: Sabit yapı güvenliğinden ziyade araç/robot durumsal farkındalığı. Karşılaştırma yapılan örnekler: SafePointe, Xtract One gibi ticari sistemler.
Karşılaşılan Problemler ve Çözümler
- Servo akımı yetersizdi → Harici 5V/1.5A adaptör eklendi, veri hatları ayrıldı, parazit azaltıldı.
- Görüş açısı dardı → Harici kamera + dönebilen turret ile genişletildi.
- Hareket algoritması uyumsuzdu → Koordinat-temelli yerine uzaklık tabanlı modele geçildi.
- Görüntü kalitesi/model tutarlılığı → Zaman toleransları (10 sn) ile geçici kayıplar dengelendi.
Kaynakça
- Ultralytics YOLO (Raspberry Pi rehberi ve sonuçların çoğaltılması)
- SoundThinking – Stealth Weapons Detection
- Xtract One – AI Powered Weapon Detection System
Sonuç
Projede, algılama–karar–eylem zinciri bir arada çalıştırıldı: YOLOv8 ile yerel tehdit algılama, seri protokolle turret’e aktarım, servo tabanlı hedef takibi ve görsel durum göstergeleri tek modülde toplandı. Entegrasyon odaklı tasarım, gerçek sistemlere (drone, UGV) hızlı tak-çalıştır esnekliği sağlıyor.